Модуль джойстика
Описание
Модуль джойстика позволит просто и удобно управлять вашим устройством, будь то робот или пульт управления домашней автоматизацией.
В основе модуля находится двухосевой джойстик, способный отклоняться во все стороны. Отклонение джойстика в ту или иную сторону сопровождается изменением аналогового сигнала. В нейтральном положении рукоятки джойстика напряжение на выводах по осям X и Y равно половине напряжения питания модуля. При отклонении джойстика в одну сторону напряжение будет нарастать до напряжения питания (например до 5 В), в противоположную - падать до 0 В. Таким образом можно отслеживать не только сам факт отклонения джойстика, но и реагировать на определенный угол его отклонения.
В качестве дополнительного функционала джойстик снабжен встроенной кнопкой. Сигнал с кнопки - цифровой. Для корректной работы кнопки на плате предусмотрен подтягивающий резистор
Для крепления модуля джойстика на плате предусмотрены 4 отверстия под винт М3.
Технические характеристики
- Напряжение питания: 3,3-5 В
- Потребляемый ток: 0,25 мА
- Тип интерфейса по осям X и Y: аналоговый линейный
- Тип интерфейса встроенной кнопки: цифровой
Физические размеры
- Размеры модуля Д х Ш х В: 34 х 27 х 27 мм
Подключение
В зависимости от необходимого функционала, модуль джойстика подключается к контроллеру с помощью следующих выводов (выводы могут быть задействованы как все одновременно, так и частично):
- GND (вывод «земли») - подключается к выводу GND контроллера;
- +5V (вывод питания) - подключается к выводу питания контроллера 5V (допускается подключение к выводу 3.3V);
- VRx (вывод значений по оси X) - подключается к аналоговому выводу контроллера;
- VRy (вывод значений по оси Y) - подключается к аналоговому выводу контроллера;
- SW (вывод кнопки) - подключается к цифровому выводу контроллера.
Смотрите также
Примеры подключения и использования
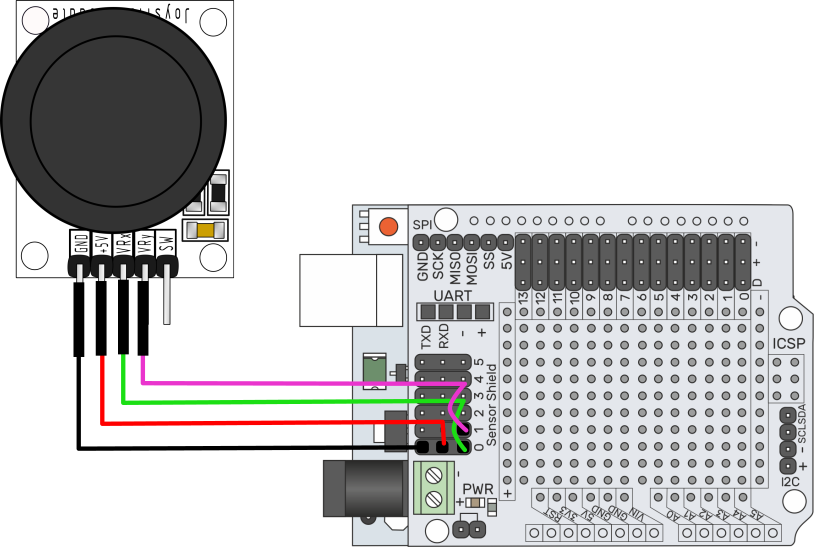
Пример 1: В примере иллюстрируется подключение модуля джойстика к контроллеру, и определение текущего значения положения рукоятки по осям. Значения выводятся в монитор Serial - порта. (Примеры тестировались на контроллере Smart UNO)
| Что нужно | Кол-во, шт |
|---|---|
| Контроллер Smart UNO | 1 |
| Модуль джойстика | 1 |
| Sensor shield | 1 |
| Шлейф мама-мама х3 | 1 |
Схема подключения:
Скетч для загрузки:
const int the_X_axis = A0; // подключение оси X к аналоговому порту 0 const int the_Y_axis = A1; // подключение оси Y к аналоговому порту 1 int value_X = 0; // хранение значения оси Х int value_Y = 0; // хранения значения оси Y void setup() { Serial.begin(9600); } void loop() { value_X = analogRead(the_X_axis); // Считать аналоговое значение Х Serial.print("X:"); Serial.print(value_X); // Вывести значение в монитор Serial порта value_Y = analogRead(the_Y_axis); // Считать аналоговое значение Y Serial.print(" Y:"); Serial.println(value_Y); // Вывести значение в монитор Serial порта delay(250); // Задержка 250 мс }
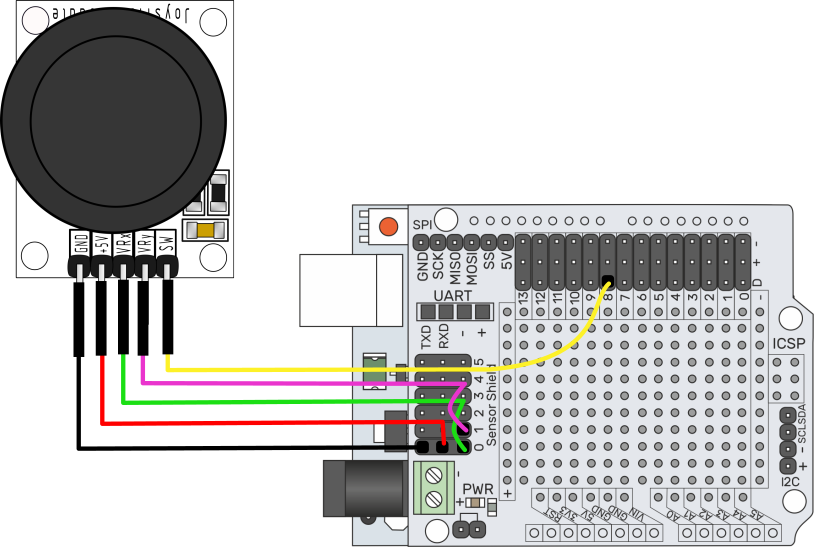
Пример 2: В примере иллюстрируется подключение модуля джойстика к контроллеру, и определение текущих значений положения рукоятки по осям . Также проверяется нажатие кнопки джойстика. Значения по осям и нажатия кнопки выводятся в монитор Serial - порта.
| Что нужно | Кол-во, шт |
|---|---|
| Контроллер Smart UNO | 1 |
| Модуль джойстика | 1 |
| Sensor shield | 1 |
| Шлейф мама-мама х3 | 1 |
Схема подключения:
Скетч для загрузки:
const int the_X_axis = A0; // подключение оси X к аналоговому порту 0 const int the_Y_axis = A1; // подключение оси Y к аналоговому порту 1 const int button = 8; // подключение кнопки джойстика int value_X = 0; // хранение значения оси Х int value_Y = 0; // хранения значения оси Y int buttonValue = 0; // значение нажатия кнопки void setup() { pinMode(buttonValue, INPUT); // Задаем как вход пин кнопки Serial.begin(9600); } void loop() { value_X = analogRead(the_X_axis); // Считать аналоговое значение Х Serial.print("X:"); Serial.print(value_X); // Вывести значение в монитор Serial порта value_Y = analogRead(the_Y_axis); // Считать аналоговое значение Y Serial.print(" Y:"); Serial.print(value_Y); // Вывести значение в монитор Serial порта buttonValue = digitalRead(button); // Считываем цифровое значение оси Z (кнопка) buttonValue = !buttonValue; // Инвертируем значение Serial.print(" button: "); Serial.println(buttonValue); // Вывести значение в монитор Serial порта delay(250); // Задержка 250 мс }