Шаговый мотор 17HS4401
Описание
Мощный шаговый мотор 17HS4401 предназначен для использования в координатных станках с ЧПУ, 3D принтерах, а также в других устройствах, где необходимо точное позиционирование и высокий крутящий момент. С помощью данного мотора можно осуществлять позиционирование с точностью шага 1,8°.
Мотор выполнен в стандартном типоразмере Nema 17 с размером 42 мм, что является наиболее популярным типоразмером в промышленных и любительских устройствах. Для установки и крепления мотора к поверхности используйте специально предназначенное для этих целей крепление.
Мотор относится к типу биполярных и имеет 4 провода для подключения. Каждая пара проводов подключена к краям своей обмотки ротора. Последовательная активация обмоток с помощью тока приводит дискретным угловым перемещениям (шагам) ротора.
Технические характеристики
- Номинальное напряжение (постоянный ток): 3,6 В
- Максимальный потребляемый ток: 1,7 А
- Тип: биполярный
- Количество фаз: 2
- Угловой шаг: 1,8°
- Точность шага: 0,09°
- Количество шагов на полный оборот: 200
- Крутящий момент: 5,5 кг·см
- Момент удержания: 2,8 кг·см
- Максимальная скорость вращения: 1900 шагов в секунду
- Сопротивление фазы: 1,5 Ом
- Индуктивность фазы: 2,8 мГн
- Диаметр вала: 4 мм
- Длина вала: 21 мм
- Вес: 280 г
Физические размеры
- Габаритные размеры Д х Ш х В: 42 х 42 х 40 мм
Подключение
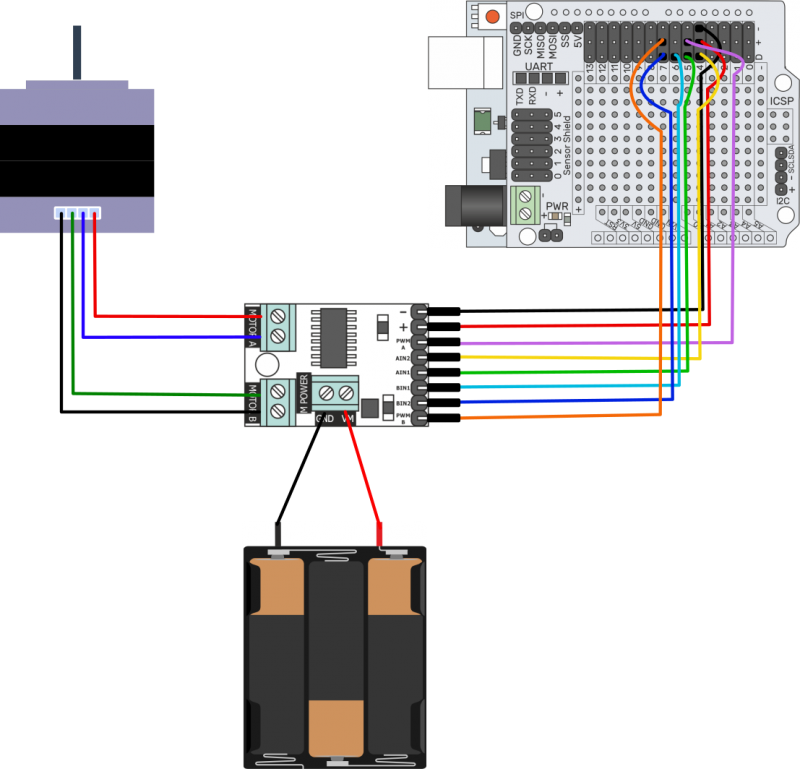
Для управления шаговым мотором с помощью контроллера потребуется специальный драйвер. В качестве драйвера можно использовать драйвер TB6612 или Motor Shield. Также для работы мотора потребуется внешнее питание.
Шаговый мотор имеет 17HS4401 4 вывода по два на каждую обмотку: черный и зеленый / синий и красный.
Специальная библиотека для работы с мотором не требуется. Достаточно библиотеки Stepper, которая автоматически устанавливается с Arduino IDE.
Примеры подключения и использования
Пример 1. Простое движение по шагам
Задача: Простой пример, иллюстрирующий выполнение мотором по одному шагу по часовой стрелке.
| Что нужно | Количество |
|---|---|
| Контроллер Smart Uno | 1 |
| Sensor Shield | 1 |
| Шаговый мотор 17HS4401 | 1 |
| Драйвер моторов TB6612 | 1 |
Схема подключения:
Скетч для загрузки:
#include <Stepper.h> const int stepsPerRevolution = 200; // количество шагов, за которые вал выполняет полный оборот Stepper myStepper(stepsPerRevolution, 4, 6, 5, 7); // создание объекта мотора для управления им void setup() { myStepper.setSpeed(100); // установка скорости вращения мотора (оборотов в минуту) } void loop() { myStepper.step(1); // сделать один шаг по часовой стрелке delay(100); // задержка 100 мс }
Пример 2. Движение на различные углы
Задача: Пример, иллюстрирующий выполнение мотором несколько шагов, поворачиваясь на заданный в скетче угол.
| Что нужно | Количество |
|---|---|
| Контроллер Smart Uno | 1 |
| Sensor Shield | 1 |
| Шаговый мотор 17HS4401 | 1 |
| Драйвер моторов TB6612 | 1 |
Схема подключения:
Скетч для загрузки:
#include <Stepper.h> const int stepsPerRevolution = 200; // количество шагов, за которые вал выполняет полный оборот Stepper myStepper(stepsPerRevolution, 4, 6, 5, 7); // создание объекта мотора для управления им void setup() { myStepper.setSpeed(20); // установка скорости вращения мотора (оборотов в минуту) } void loop() { myStepper.step(25); // сделать поворот на 45 градусов (25 шагов по 1,8 градуса) delay(1000); // задержка 1с myStepper.step(50); // поворот на 90 градусов delay(1000); // задержка 1с myStepper.step(100); // поворот на 180 градусов delay(1000); // задержка 1с myStepper.step(-200); // выполнить разворот на 360 градусов против часовой стрелки delay(1000); // задержка 1с }