Это старая версия документа.
Motor Shield (SmartElements)
Описание
Плата расширения Motor Sheld, выполненная на базе микросхемы L298P, позволяет управлять моторами и дополнительными устройствами. Является незаменимой платой при конструировании и сборке роботов, а также других устройств, использующих коллекторные и шаговые моторы. Motor Shield совместим со всеми типами контроллеров Arduino, совпадающих по форм-фактору (в том числе совместим с контроллерами Smart Uno, Smart Mega и Smart Leonardo).
Плата имеет два канала для управления моторами и позволяет подключить два коллекторных мотора или один шаговый. Допускается параллельное подключение нескольких моторов в один канал. Такой вариант подключения будет удобен, например, для четырехколесных роботов. Motor Shield позволяет подключать моторы мощностью до 2 А на каждый канал. При необходимости использования более мощного мотора - каналы можно объединить, получив при этом суммарно до 4 А. Обратите внимание, при работе платы с моторами потребляющими большой ток, микросхема сильно нагревается. Во избежании ожога, не прикасайтесь к микросхеме в процессе работы.
Для управления направлением вращения моторов используются выводы М1 и М2, по умолчанию с помощью перемычек использующие выводы 5 и 6 контроллера и шилда. Для управления скоростью вращения моторов используются выводы Е1 и Е2, по умолчанию с помощью перемычек использующие выводы 4 и 7 контроллера и шилда. Вы можете использовать другие выводы контроллера и шилда для управления моторами - для этого соедините выводы шилда М1, М2, Е1 и Е2 с другими цифровыми выводами посредством гибких проводов «мама-мама» (обратите внимание, для регулировки скорости вращения моторв выводы Е1 и Е2 должны подключаться к выводам, поддерживающим ШИМ).
Плата совмещает в себе возможности Motor Shield и Sensor Shield. Для подключения периферии на плату выведены трехконтактные разъемы для подключения модулей и датчиков (13 цифровых и 6 аналоговых). Кроме того, на плате предусмотрены следующие дополнительные разъемы: UART, I2C, а также DIST и INDICATOR.
Разъем DIST позволяет подключить ультразвуковой дальномер (HC-SR04 или US-015) или другой датчик или модуль, использующий аналогичную распиновку. Для работы данный разъем использует цифровые выводы 12 и 13 контрллера и шилда.
Разъем INDICATOR позволяет подключить модуль 4-х разрядного индикатора или другой модуль или датчик, использующий аналогичную распиновку. Для работы данный разъем использует цифровые выводы 8 и 9 контрллера и шилда.
Светодиод на плате отображает состояние питания Motor Shield: если светодиод горит - шилд получает питание, если не горит - питание на шилд не поступает.
Перемычка JOIN на плате отвечает за режим питания. Если перемычка установлена - внешнее питание от разъема PWR поступает и на шилд и на контроллер через пин Vin. Рекомендуемое напряжение в таком случае должно быть 7-12 В. Если перемычка снята - внешнее питание поступает только на Motor Shield (для питания контроллера требуется дополнительный источник питания). Рекомендуемое напряжение в таком случае может быть 5-24 В. В качестве внешнего питания можно использовать Power Shield, установив его между контроллером и Motor Shield.
Схема платы
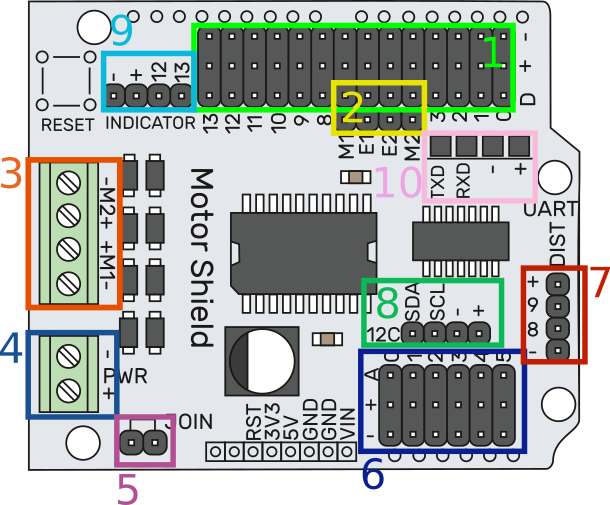
На схеме обозначены:
- Цифровые выводы (D0 - D13)
- Выводы управления направлением движения (М1 и М2) и скоростью (Е1 и Е2)
- Клеммные колодки для подключения моторов
- Клеммные колодки для подключения внешнего питания
- Перемычка управления режимом питания
- Аналоговые выводы (A0 - A5)
- Выводы для подключения дальномера
- Выводы для подключения по интерфейсу I2C
- Выводы для подключения индикатора
- Выводы для подключения по интерфейсу UART
Физические размеры
- Шилд (Д х Ш х В): 60 х 53 х 20 мм
Плюсы использования
- Удобное подключение устройств
- Имеет отдельные выводы для подключения по интерфейсам I²C и UART
- Разъём для внешнего питания (со светодиодом-индикатором)
- Совмещает в себе два шилда - шилд для управления моторами и сенсор шилд
Библиотеки
Описание библиотеки
Для более удобной работы с шилдом предусмотрена библиотека robotSE. Ниже приведено описание работы с библиотекой.
Инициализация
Инициализация и создание объекта для управления движением происходит с помощью типа robotSE. Простейший способ создания объекта робота:
robotSE myRobot;
При таком вызове выводы шилда назначены по-умолчанию. Если требуется указать явно номера выводов, используйте создание объекта с параметрами:
robotSE myRobot(E1, E2, M1, M2, speed)
где:
- E1 - вывод подключения пина мотор-шилда Е1
- E2 - вывод подключения пина мотор-шилда E2
- M1 - вывод подключения пина мотор-шилда M1
- M2 - вывод подключения пина мотор-шилда M2
- speed - скорость вращения моторов (задаётся значением от 0 до 255, где 0 - колёса вращаться не будут). По-умолчанию скорость равна 150.
Установка скорости
Для управления скоростью предусмотрен метод setSpeed(speed), имеющий единственный параметр - скорость, от 0 до 255.
Движение
Для управления движением предусмотрены следующие методы (движение происходит со скоростью, указанной при изначальном создании объекта робота или установленной с помощью метода setSpeed(speed)):
- move_forward() - робот движется вперед
- move_right() - робот движется вправо
- move_left() - робот движется влево
- move_back() - робот движется назад
- move_stop() - робот останавливается
- randomMove() - робот движется в случайном направлении. Техника движения следующая: сначала случайным образом робот поворачивает с заданной выше скоростью в течении 200 мс, затем движется вперёд.
Пример подключения и использования
Пример: Для демонстрации работы шилда используется простейший робот, который движется по четырём направлениям (вперед, назад, вправо и влево). Робот собирается очень просто - берётся трёхколёсное шасси с двумя моторами, на платформу шасси крепится контроллер Smart Uno, на контроллер прикрепляется Power Shield, в свою очередь на Power shield прикрепляется Motor shield.
Для этого нам понадобится:
| Что нужно: | Кол-во, шт |
|---|---|
| Контроллер SmartUno | 1 |
| Шасси 2WD SmartElements | 1 |
| Motor Shield | 1 |
| Power Shield | 1 |
Подключение:
- Закрепите на верхней площадке шасси контроллер Smart Uno с помощью винтов и гаек M2, как указано в инструкции к шасси.
- На контроллере закрепите плату Power Shield, путём совмещения контактов платы расширения с контактами конроллера.
- Сверху, на Power Shield закрепите плату Motor shield, путём совмещения контактов Motor shield с контактами платы Power Shield.
- Подключите моторы к плате расширения Motor shield, к клеммным колодкам М1 и М2 (на схеме сверху выделены оранжевым прямоугольником с номером 3). Правый мотор подключите к клеммной колодке M1, красный провод к контакту «+», чёрный к контакту «-». Аналогично подключите левый мотор к клеммной колодке М2.
Скетч для загрузки:
#define E1 6 //Вывод платы расширения Motor Drive Shield, используемый для контроля скорости мотора А. #define E2 5 //Вывод платы расширения Motor Drive Shield, используемый для контроля скорости мотора В. #define M1 7 //Вывод платы расширения Motor Drive Shield, используемый для контроля направления вращения мотора А. #define M2 4 //Вывод платы расширения Motor Drive Shield, используемый для контроля направления вращения мотора В. int motorSpeed = 255; //Переменная для хранения скорости вращения моторов (вы можете задать свою скорость вращения колес). int delay_time = 1500; void motor_drive_config() //Инициализация выводов платы расширения Motor Drive Shield. { pinMode(M1, OUTPUT); //Назначение вывода M1 выходом. pinMode(M2, OUTPUT); //Назначение вывода M2 выходом. pinMode(E1, OUTPUT); //Назначение вывода E1 выходом. pinMode(E2, OUTPUT); //Назначение вывода E2 выходом. } void move_forward() //Движение робота вперед. { digitalWrite(M1, HIGH); //Левые колеса вращаются вперед. digitalWrite(M2, HIGH); //Правые колеса вращаются вперед. analogWrite(E1, motorSpeed); //Скорость вращения правых колес. analogWrite(E2, motorSpeed); //Скорость вращения левых колес. } void move_right() //Движение робота вправо. { digitalWrite(M1, LOW); //Левые колеса вращаются назад. digitalWrite(M2, HIGH); //Правые колеса вращаются вперед. analogWrite(E1, motorSpeed); //Скорость вращения левых колес. analogWrite(E2, motorSpeed); //Скорость вращения правых колес. } void move_left() //Движение робота влево. { digitalWrite(M1, HIGH); //Левые колеса вращаются вперед. digitalWrite(M2, LOW); //Правые колеса вращаются назад. analogWrite(E1, motorSpeed); //Скорость вращения левых колес. analogWrite(E2, motorSpeed); //Скорость вращения правых колес. } void move_stop() //Остановка робота. { digitalWrite(M1, LOW); //Левые колеса вращаются назад. digitalWrite(M2, LOW); //Правые колеса вращаются назад. analogWrite(E1, 0); //Скорость вращения колес снизить до 0. analogWrite(E2, 0); //Скорость вращения колес снизить до 0. } void move_back() //Движение робота назад. { digitalWrite(M1, LOW); //Левые колеса вращаются назад. digitalWrite(M2, LOW); //Правые колеса вращаются назад. analogWrite(E1, motorSpeed); //Скорость вращения левых колес. analogWrite(E2, motorSpeed); //Скорость вращения правых колес. } void setup() // Задание начальных параметров системы. { motor_drive_config(); //инициализация выводов платы расширения Motor Drive Shield. move_stop(); //начальная позиция робота — робот стоит. } void loop() //Основной цикл { move_forward(); //движение вперёд delay(delay_time); //задержка move_right(); //движение вправо delay(delay_time); //задержка move_left(); //движение влево delay(delay_time); //задержка move_back(); //движение назад delay(delay_time); //задержка move_stop(); //остановка delay(delay_time); //задержка }