Минибот - полицейский
Описание
Попробуем воссоздать из робота полицейскую машину. Или машину скорой помощи. Для этого поместим на робота мигалки и сигнализацию. И оставим режим движения по объезду препятствий.
Дополнительные модули
Предполагается что у Вас уже есть набор Минибот, и вы собрали его по инструкции в руководстве пользователя. Тогда дополнительно понадобится:
| Что нужно | Кол-во, шт |
|---|---|
| Модуль адресных светодиодов | 2 |
| Модуль зуммера | 1 |
Библиотеки
Порядок действий
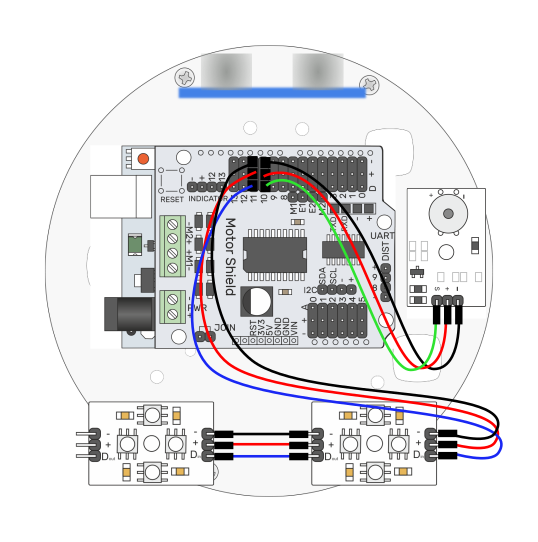
Шаг 1. Пересоберите робота
- С помощью отвёртки, входящей в комплект набора, снимите с платформы модуль ИК-приёмника
- С помощью отвёртки, входящей в комплект набора, прикрепите на место модуля ИК-приёмника - Модуль зуммера
- Присоедините модуль зуммера с помощью трёхпроводного шлейфа к выводам D10 мотор шилда.
- С помощью отвёртки, входящей в комплект набора, снимите с платформы модуль 4-х разрядного индикатора
- С помощью отвёртки, входящей в комплект набора, прикрепите на нижние крепления модуля 4-х разрядного индикатора - два модуля адресных светодиодов
- Присоедините один из модулей адресных светодиодов с помощью трёхпроводного шлейфа к выводам D11 мотор шилда.
- Соедините между собой модули адресных светодиодов трёхпроводным шлейфом.
Шаг 2. Установите библиотеки
Установите в Arduino IDE библиотеки, которые представлены по ссылкам выше. О том как устанавливаются библиотеки описано в руководстве пользователя, входящем в комплект, либо посетите соответствующий раздел Базы Знаний.
Зачем нужна библиотека для зуммера?
Внимание! Подразумевается что библиотеки для входящих в набор модулей вы уже установили так как это описано в руководстве пользователя!
Шаг 3. Загрузите скетч на контроллер
#include <robotSE.h> //Подключение библиотеки для работы с платформой. #include <NewPing.h> //Подключение библиотеки для работы с дальномером. #include <Adafruit_NeoPixel.h> //Библиотека для работы со светодиодами #include <NewTone.h> //Библиотека для работы с зуммером const int min_distance = 10; //Минимальное расстояние в сантиметрах const int PIN_BUZ = 10; //Вывод для подключения модуля зуммера const int PIN_LED = 11; //Вывод подключения адресных светодиодов boolean nowRed = true; //Флаг для вывода цвета robotSE robot; //создание объекта робота NewPing sonar(8, 9, 400); //Создание объекта дальномера. - (trig, echo, max_dist) Adafruit_NeoPixel pixels(8, PIN_LED); //создание объекта адр. светодиодов void setup() { pinMode(PIN_BUZ, OUTPUT); //Установка вывода зуммера как выходной pixels.begin(); //инициализация светодиодов } void loop() { int cm = sonar.ping_cm(); //Получение расстояния с датчика. if (cm == 0) { //Если получено нулевое значение, return; //измерить расстояние еще раз. } //нумерация светодиодов начинается с 0 for(int i=0; i<8; i++) { pixels.setPixelColor(i, pixels.Color(nowRed?255:0, 0, nowRed?0:255)); //установка цвета свечения для очередного светодиода pixels.show(); //показать цвет светодиода nowRed = !nowRed; //смена флага } NewTone(PIN_BUZ, nowRed?294:396); if (cm < min_distance) { //Если расстояние меньше минимального, robot.move_stop(); //остановиться. robot.move_back(); //Немного отъехать назад. delay(1000); //Задержка величиной 1 с. robot.move_left(); //Выполнить поворот. delay(500); //Задержка 200 мс. } robot.move_forward(); //Движение в случайную сторону delay(1000); //Задержка 1 сек. nowRed = !nowRed; //смена флага }
Шаг 4. Робот вперёд!
Отсоедините кабель от контроллера, поставьте платформу на ровную поверхность и переведите переключатель питания в положение ON. Робот будет передвигаться прямо до препятствия, стараясь обогнуть его. При этом у робота включена световая и звуковая сигнализация. Световая сигнализация попеременно меняет цвет (красный и синий), звуковая - меняет тон. Получаем настоящую машину экстренных служб.